RXタコメータをバイクに乗せて比較的長距離走ってみたので、これを解析します。
変更点
いくつか変更したことがあります。
加速度ログデータフォーマットの変更
加速度ログデータの先頭に設定値を残すよう、プログラムの変更を行っています。これで、データから自動で測定間隔、測定分解能を取得してグラフの軸に反映させることができます。
データファイルフォーマット :
| アドレス(byte) | サイズ(byte) | 内容 | 値 |
|---|---|---|---|
| 0x0 | 0x4 | ヘッダ識別子 | 'LOGH' (0x4C4F4748) |
| 0x4 | 0x4 | ヘッダバージョン | 0x1 |
| 0x8 | 0x4 | ヘッダデータサイズ(ヘッダ識別子、バージョンは含まない) | 0x8 |
| 0xC | 0x4 | 測定レート | ADXL345レジスタに設定する4bitコード |
| 0x10 | 0x4 | 測定レンジ | ADXL345レジスタに設定する2bitコード |
| 0x14以降 | 加速度データ |
- ヘッダ識別子を入れることで、この情報領域を持っていないバージョンのデータでも同じ解析ツールで解析することができます。
- ヘッダバージョンを入れることで、またあとでフォーマットを変えたくなった場合でも後方互換の解析ツールを用意することができます。
- ヘッダデータサイズを入れることで、ヘッダの読み飛ばしが簡単にできるようになります。
グラフ表示
横軸を秒単位で、縦軸をG単位(重力加速度単位)にするようにしました。先ほどのヘッダから情報を取得します。
これを反映して、ログファイル読み込みのOctaveスクリプトを変更しました。
function [gData ovrn] = read_adxl345_log_bin_2byte(fname)
fid = fopen(fname, "r");
# Read header
hdrId = fread(fid, 1, "uint32");
if (hdrId == 0x4C4F4748) # 'LOGH', little endian
hdrVer = fread(fid, 1, "uint32");
hdrSize = fread(fid, 1, "uint32");
printf("Header detected, Ver:%d, Size:%d\n", hdrVer, hdrSize);
if(hdrVer == 1)
hdrRate = fread(fid, 1, "uint32");
hdrRange = fread(fid, 1, "uint32");
rateCodes = [0x0, 0x1, 0x2, 0x3, 0x4, 0x5, 0x6, 0x7, ...
0x8, 0x9, 0xA, 0xB, 0xC, 0xD, 0xE, 0xF];
rateVals = [0.1, 0.2, 0.39, 0.78, 1.56, 3.13, 6.5, 12.5, ...
25, 50, 100, 200, 400, 800, 1600, 3200]; # Measure frequency in Hz
rangeCodes = [0x0, 0x1, 0x2, 0x3];
rangeVals = [2.0, 4.0, 8.0, 16.0]; # Measure range in G
rate = rateVals(find(rateCodes == hdrRate)(1));
range = rangeVals(find(rangeCodes == hdrRange)(1));
dt = 1 / rate;
gUnit = range * 2 / 1024.0; # 10bit ADC, -range ~ +range
printf("Rate:%d[Hz], Range:%d[G]\n", rate, range);
endif
dataTop = 12 + hdrSize;
else # Header was not detected
dt = 1;
gUnit = 0.004; # 4mg/LSB
fseek(fid, 0, SEEK_SET);
dataTop = 0;
printf("Header was not detected\n");
endif
# Data body
gData = fread(fid, Inf, "int16", 2);
gData = [dt*[1:size(gData)(1)].', gUnit*gData];
# gData(:,1) : Time
# gData(:,2) : Acceleration
fseek(fid, dataTop + 2, SEEK_SET);
ovrn = fread(fid, Inf, "int16", 2);
fclose(fid);
endfunction
今までのスクリプトでは、読み出し結果として返すgDataは単に加速度データ列でしたが、このスクリプトでは秒単位の時刻列も追加しています。
また、加速度の単位もGに直しています。
# gData(:,1) : Time # gData(:,2) : Acceleration
実データでグラフ表示
Octaveグラフ表示の手順は以下の通りです。
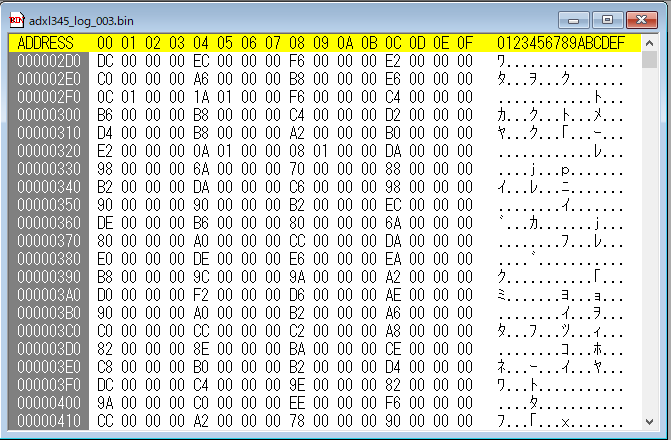
まずバイナリファイル読み込み。
読み取ったヘッダ情報等も表示されます。
>> [gData ovrn] = read_adxl345_log_bin_2byte("adxl345_log_003.bin");
Header detected, Ver:1, Size:8
Rate:1600[Hz], Range:2[G]
以下のようにしてやると、書き込みバッファのオーバーランが起こったかどうか、どこで起こったかが分かります。
>> find(ovrn == 1)
ans =
3196
3197
6396
6397
17532
17533
28668
28669
39804
39805
41468
41469
52604
52605
63740
63741
やっぱりオーバランしているようです。
それほど頻繁にデータが抜けているわけではないので、これで進めます。
>> gFFT = fft_slice(gData(1:end,2),512);
OctaveのGUIを使っていると、変数の状態を見ることができます。

"ワークスペースウィンドウ"を見ると、gFFTが512x214のサイズで確保されたことが分かります。
時間方向に214点取れたようです。
前と同様にpcolorを使用してグラフ表示しますが、今回は軸の目盛りで縦軸に周波数の値、横軸に秒単位の時間と、希望の値を表示するようにしたいと思います。
まず、横軸の目盛りを示す配列を用意します。
>> x = gData(512:512:end,1); >> size(x) ans = 124 1
512点のFFTを取っているので、gDataの時間データを1/512に間引いたものとしています。サイズも合っています。
次に縦軸、これは時間刻みの逆数を最大周波数として、これを512分割したものになります。
>> y = [1:512]/512/gData(1,1);
これらを使って、pcolorでグラフ表示します。
>> pcolor(x, y, abs(gFFT));

横軸、縦軸の目盛りが前回と変わりました。
ラベルも付けておきます。
>> xlabel("t[s]");
>> ylabel("Freq[Hz]");

周波数範囲後半の半分は見る意味がないのと、DC成分は省きたい、前回見たところではそれほど広い周波数範囲は見ないで良さそうだった、というところから、表示範囲を変えます。
pcolorをやり直すと、ラベル等がリセットされるので、もう一度出します。ついでに表示色凡例も出します。
>> pcolor(x, y(3:128), abs(gFFT(3:128,:)));
>> xlabel("t[s]");
>> ylabel("Freq[Hz]");
>> colorbar

それらしいものが表示されました。
40秒間くらいのデータですが、確か停止状態→発進→停止のログだったかと思います。
ドラッグスター250は5速までありますが、このログを見るとギアチェンジしたと思われる箇所(回転数が急激に落ちるところ)が4か所あるので、それっぽいです。
いい感じのグラフ表示ができました。
このグラフを見ると、はっきりした周波数のピークが見られるので、このピーク周波数が回転数に対応すると思ってよさそうです。
別データ
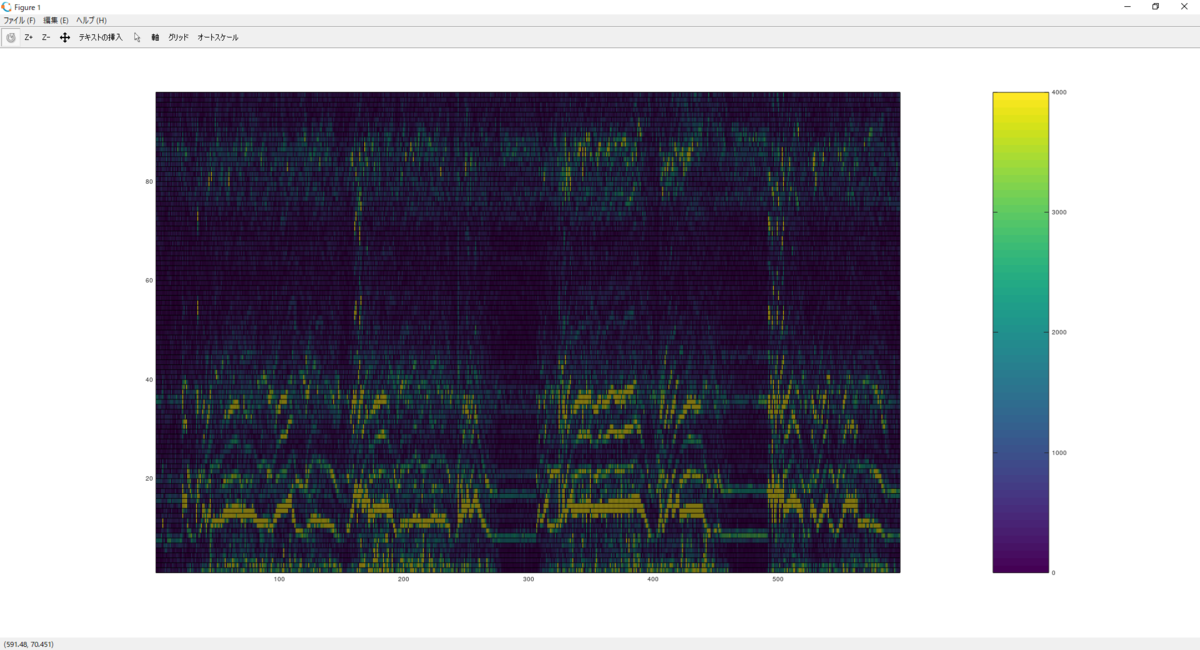
前のデータは40秒程度のデータですが、より長時間取ったデータをグラフ表示しました。

6分ぐらいのログデータになっています。
結構汚くなっているのと、なぜか値の範囲を変更しないと波形が見えませんでした…
うまくグラフが見えなかったので、凡例も消しました。
>> caxis([0 20]);
>> colorbar("off");
これはまた後で表示を見直してみようかな。
まとめ
グラフ表示ができ、どんな加速度が測定できているかという様子が見えてきました。
ここから回転数の推定をしていこうと思いますが、1つ課題として、これが正しいのかどうかを評価する、ということがあります。
この評価方法も考えていこうと思います。