今回は、OpenCVチュートリアルの以下のページを参考に進めてみたいと思います。
エピポーラ幾何の理論はチュートリアルサイトの説明を参照で。
今回のテーマ画像
今回は、春のパン祭り台紙の2視点分の画像でマッチング、Epipolar lineの描画をしてみたいと思います。
似たような特徴点が複数あるので難しそうと思いましたが、RANSAC等適用すればうまくマッチングできるのではと。
import cv2 img1 = cv2.imread('harupan_210402_1.jpg') img2 = cv2.imread('harupan_210402_2.jpg') img1= cv2.resize(img1, None, fx=0.2, fy=0.2, interpolation=cv2.INTER_AREA) img2= cv2.resize(img2, None, fx=0.2, fy=0.2, interpolation=cv2.INTER_AREA) img12 = np.hstack((img1, img2)) cv2.imshow('Image', img12) cv2.waitKey(0)
画像サイズはいずれも806x605になっています。
>>> img1.shape (806, 605, 3) >>> img2.shape (806, 605, 3)
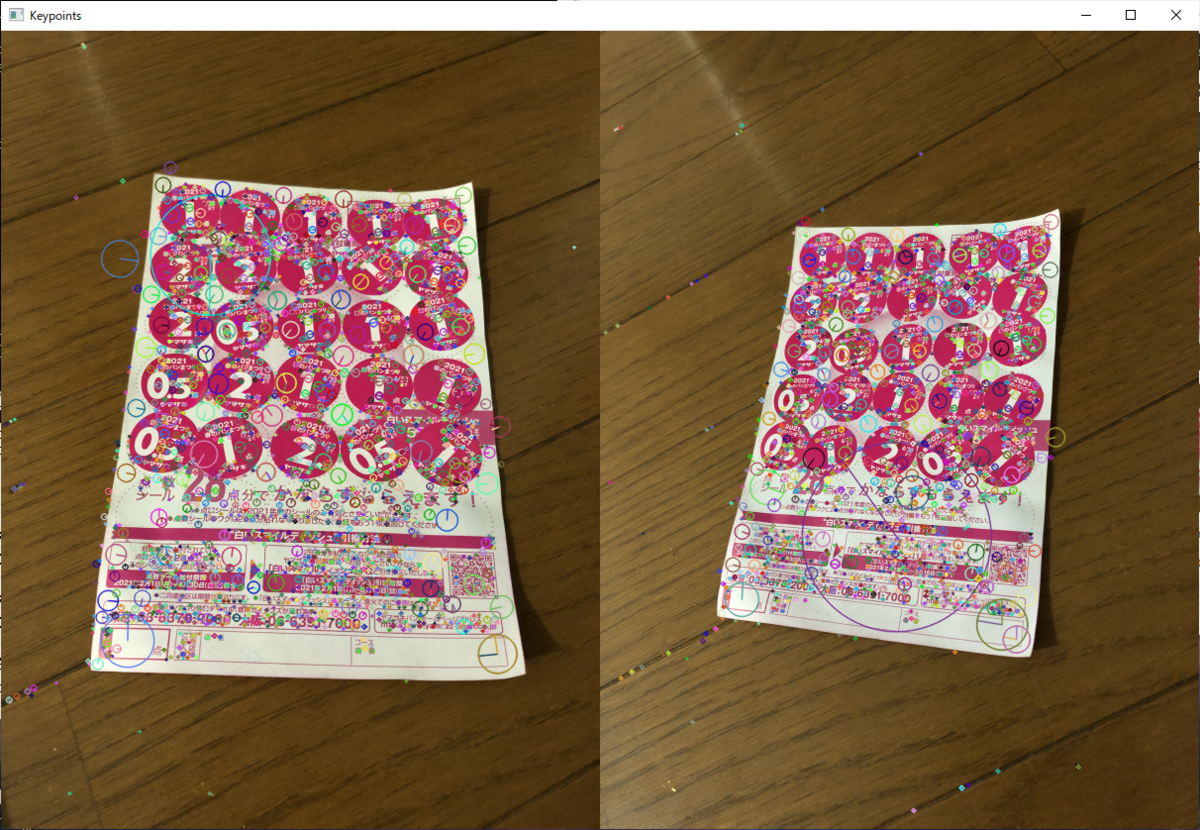
特徴点検出、特徴量算出
SIFTを使いました。
sift = cv2.SIFT_create() kp1, des1 = sift.detectAndCompute(img1, None) kp2, des2 = sift.detectAndCompute(img2, None) img1_kp = cv2.drawKeypoints(img1, kp1, None, flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS) img2_kp = cv2.drawKeypoints(img2, kp2, None, flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS) img12_kp = np.hstack((img1_kp, img2_kp)) cv2.imshow('Keypoints', img12_kp) cv2.waitKey(0)
マッチング
ここでは総当たりマッチングを使います。
bf = cv2.BFMatcher() matches = bf.match(des1, des2) matches = sorted(matches, key = lambda x:x.distance) img_matches = cv2.drawMatches(img1, kp1, img2, kp2, matches[:200], None, flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS) cv2.imshow('Matches', img_matches) cv2.waitKey(0)
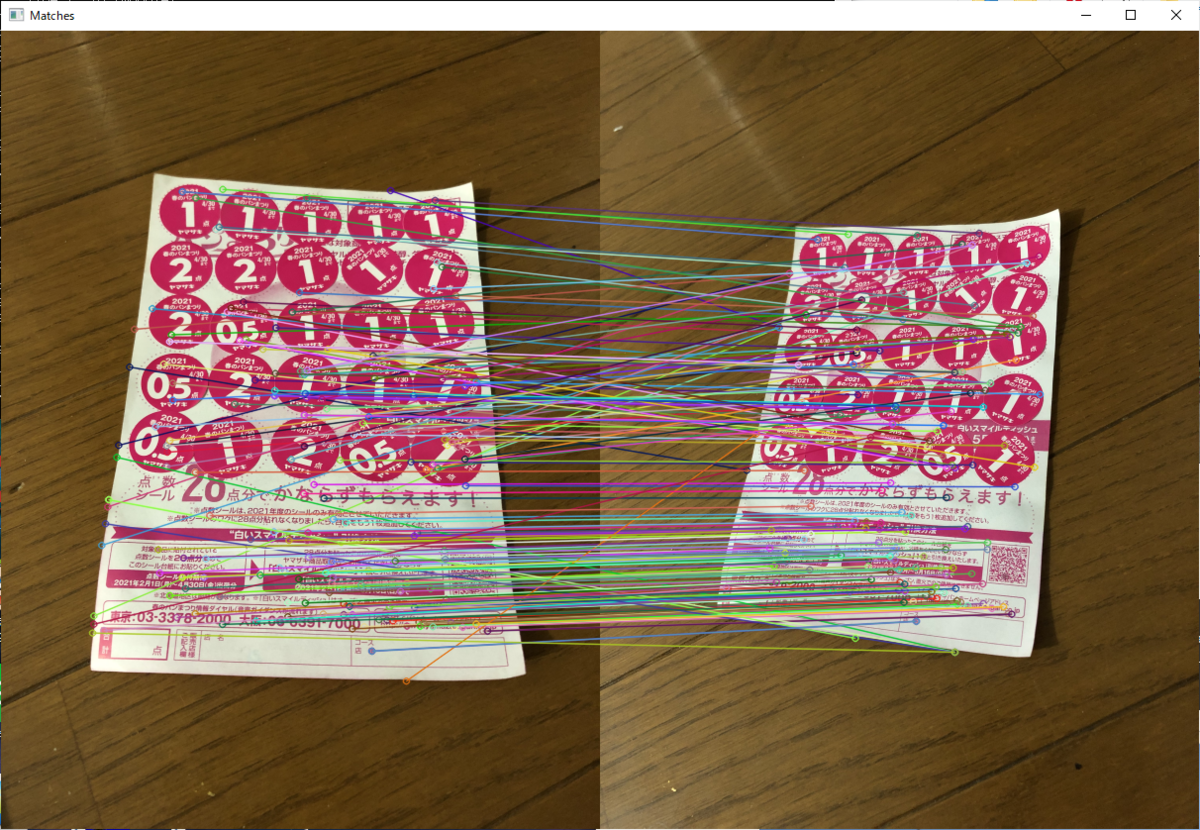
いまいちな結果なので、ratio testも入れてみます。
matches_rt = bf.knnMatch(des1, des2, k=2) good_matches = [] for m,n in matches_rt: if m.distance < 0.75*n.distance: good_matches.append(m) good_matches = sorted(good_matches, key = lambda x:x.distance) img_good_matches = cv2.drawMatches(img1, kp1, img2, kp2, good_matches[:200], None, flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS) cv2.imshow('Good matches', img_good_matches) cv2.waitKey(0)
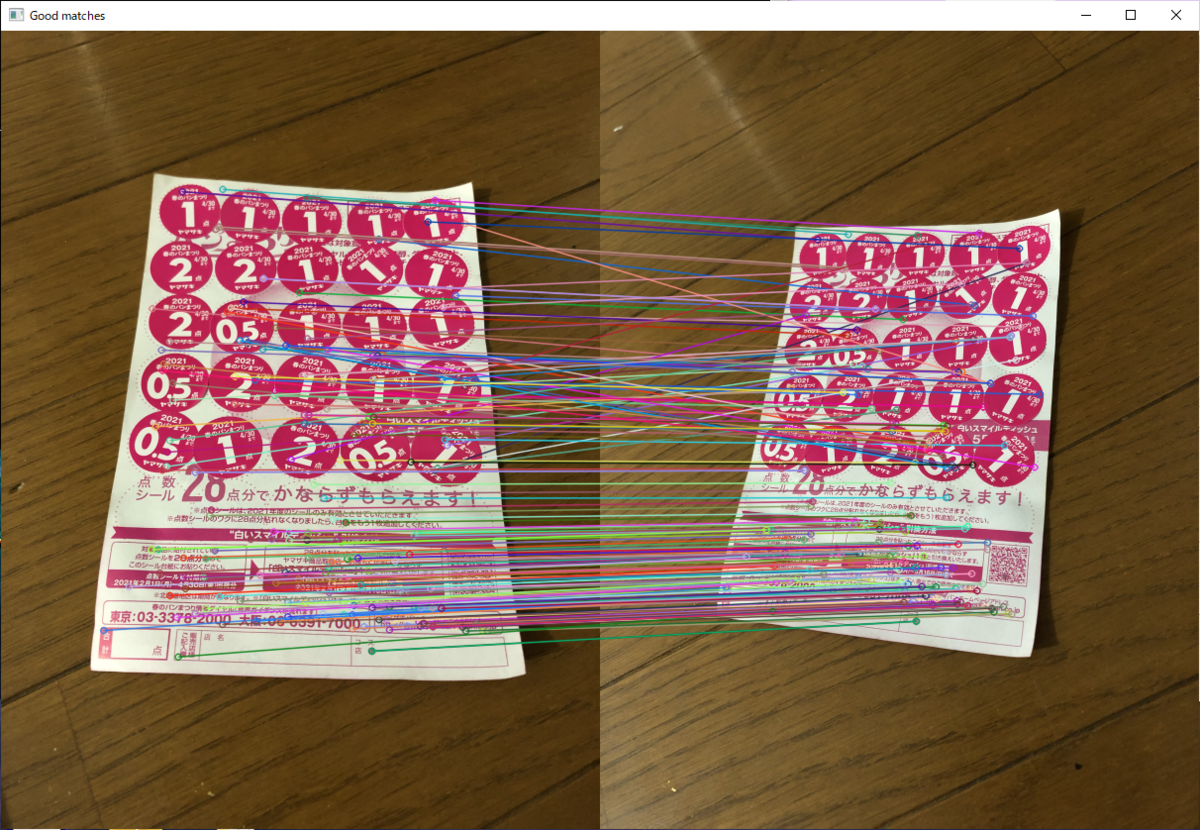
これでもまだまだですが、この結果を使っていきます。
ちなみに、good_matchesには1169個のマッチが含まれていました。
>>> len(good_matches) 1169
Fundamental matrix計算
Fundamental matrixの計算をやってみます。
この過程でマッチング結果のinlier、outlierを判定してくれるので、
それも見てみます。
pts1 = [] pts2 = [] for i,m in enumerate(good_matches): pts1.append(kp1[m.queryIdx].pt) pts2.append(kp2[m.trainIdx].pt) import numpy as np pts1 = np.int32(pts1) pts2 = np.int32(pts2) F, mask = cv2.findFundamentalMat(pts1, pts2, cv2.FM_LMEDS) pts1_inliers = pts1[mask.ravel() == 1] pts2_inliers = pts2[mask.ravel() == 1] good_matches_inliers = [m for i,m in enumerate(good_matches[:200]) if mask[i,0] == 1] img_good_matches_inliers = cv2.drawMatches(img1,kp1,img2,kp2,good_matches_inliers[:200],None,flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS) cv2.imshow('Good matches(inliers)', img_good_matches_inliers) cv2.waitKey(0)
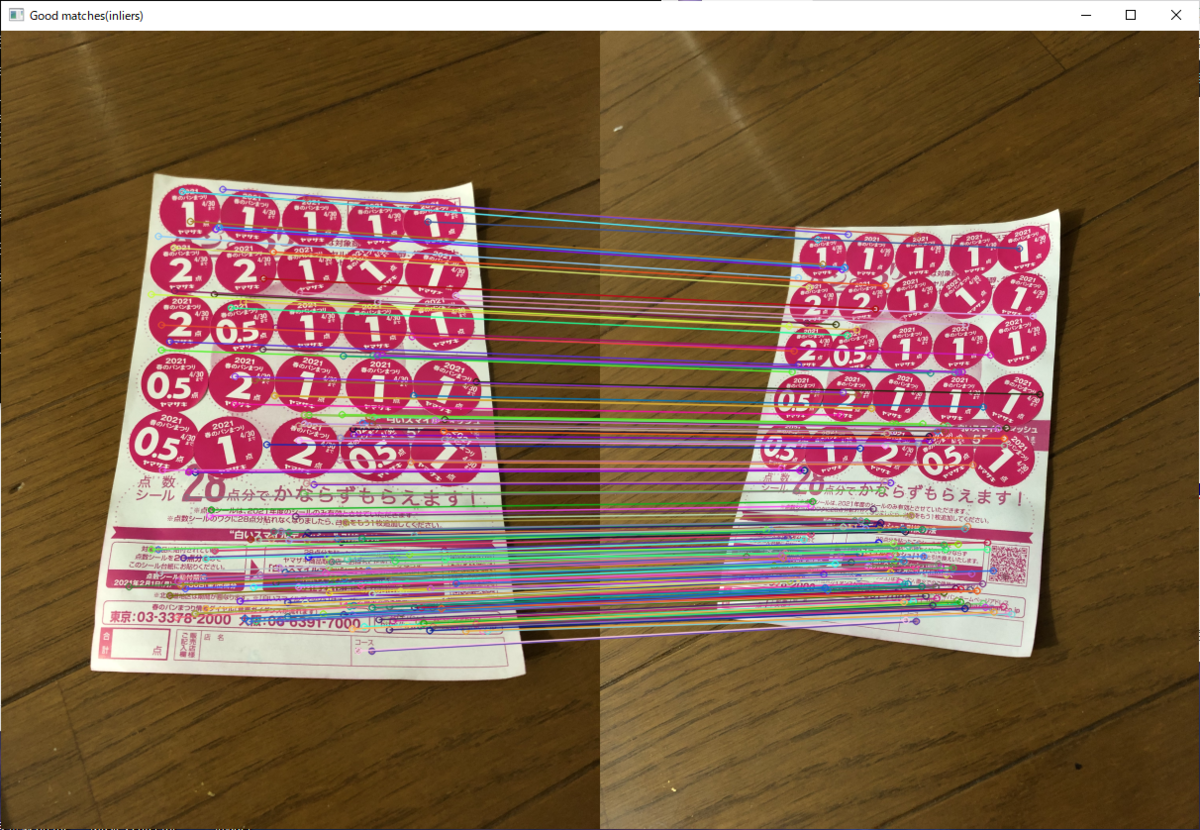
しっかり合っているものだけ残っているようです。 すごい!
ちなみに、マッチング点が1169点あったのに対して、inlierは866点になっていました。
>>> len(pts1_inliers) 866
Epipolar line描画
では計算したFundamental matrixを元にEpipolar lineを描画するとどうなるかというと、
def drawlines(img1,img2,lines,pts1,pts2): ''' img1 - image on which we draw the epilines for the points in img2 lines - corresponding epilines ''' r,c,ch = img1.shape for r,pt1,pt2 in zip(lines,pts1,pts2): color = tuple(np.random.randint(0,255,3).tolist()) x0,y0 = map(int, [0, -r[2]/r[1] ]) x1,y1 = map(int, [c, -(r[2]+r[0]*c)/r[1] ]) img1 = cv2.line(img1, (x0,y0), (x1,y1), color,1) img1 = cv2.circle(img1,tuple(pt1),5,color,-1) img2 = cv2.circle(img2,tuple(pt2),5,color,-1) return img1,img2 pts1_inliers_200 = pts1_inliers[0:200,:] pts2_inliers_200 = pts2_inliers[0:200,:] lines1 = cv2.computeCorrespondEpilines(pts2_inliers_200.reshape(-1,1,2),2,F) lines1 = lines1.reshape(-1,3) img5,img6 = drawlines(img1.copy(),img2.copy(),lines1,pts1,pts2) lines2 = cv2.computeCorrespondEpilines(pts1_inliers_200.reshape(-1,1,2),1,F) lines2 = lines2.reshape(-1,3) img3,img4 = drawlines(img2.copy(),img1.copy(),lines2,pts2,pts1) img35 = np.hstack((img3,img5)) cv2.imshow('Epipolar lines', img35) cv2.waitKey(0)
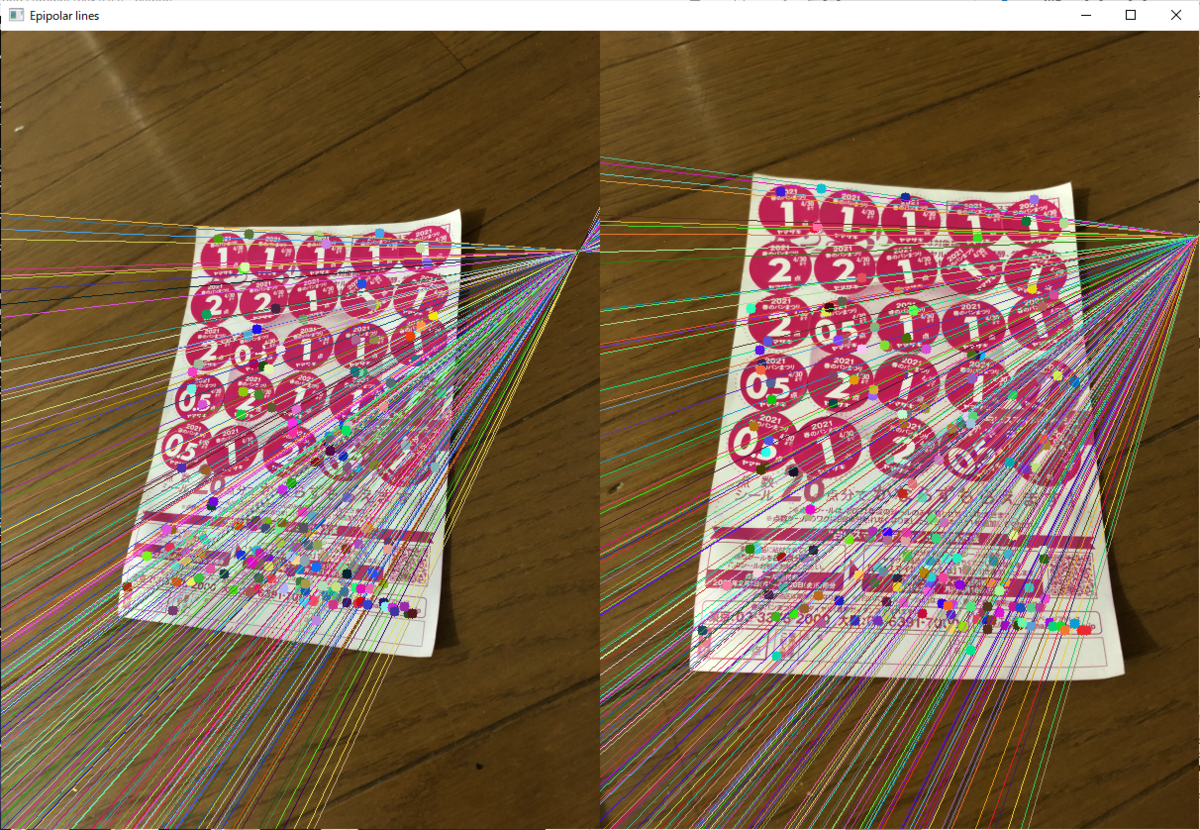
こんな感じになっちゃいました。思っていたのと違う…
試しにFundamental matrixの計算で使うマッチング点数を減らしてみたりしましたが、
F, mask = cv2.findFundamentalMat(pts1[0:200,:], pts2[0:200,:], cv2.FM_LMEDS) pts1_inliers = pts1[mask.ravel() == 1] pts2_inliers = pts2[mask.ravel() == 1] pts1_inliers_200 = pts1_inliers[0:200,:] pts2_inliers_200 = pts2_inliers[0:200,:] lines1 = cv2.computeCorrespondEpilines(pts2_inliers_200.reshape(-1,1,2),2,F) lines1 = lines1.reshape(-1,3) img5,img6 = drawlines(img1.copy(),img2.copy(),lines1,pts1,pts2) lines2 = cv2.computeCorrespondEpilines(pts1_inliers_200.reshape(-1,1,2),1,F) lines2 = lines2.reshape(-1,3) img3,img4 = drawlines(img2.copy(),img1.copy(),lines2,pts2,pts1) img35 = np.hstack((img3,img5)) cv2.imshow('Epipolar lines', img35) cv2.waitKey(0)
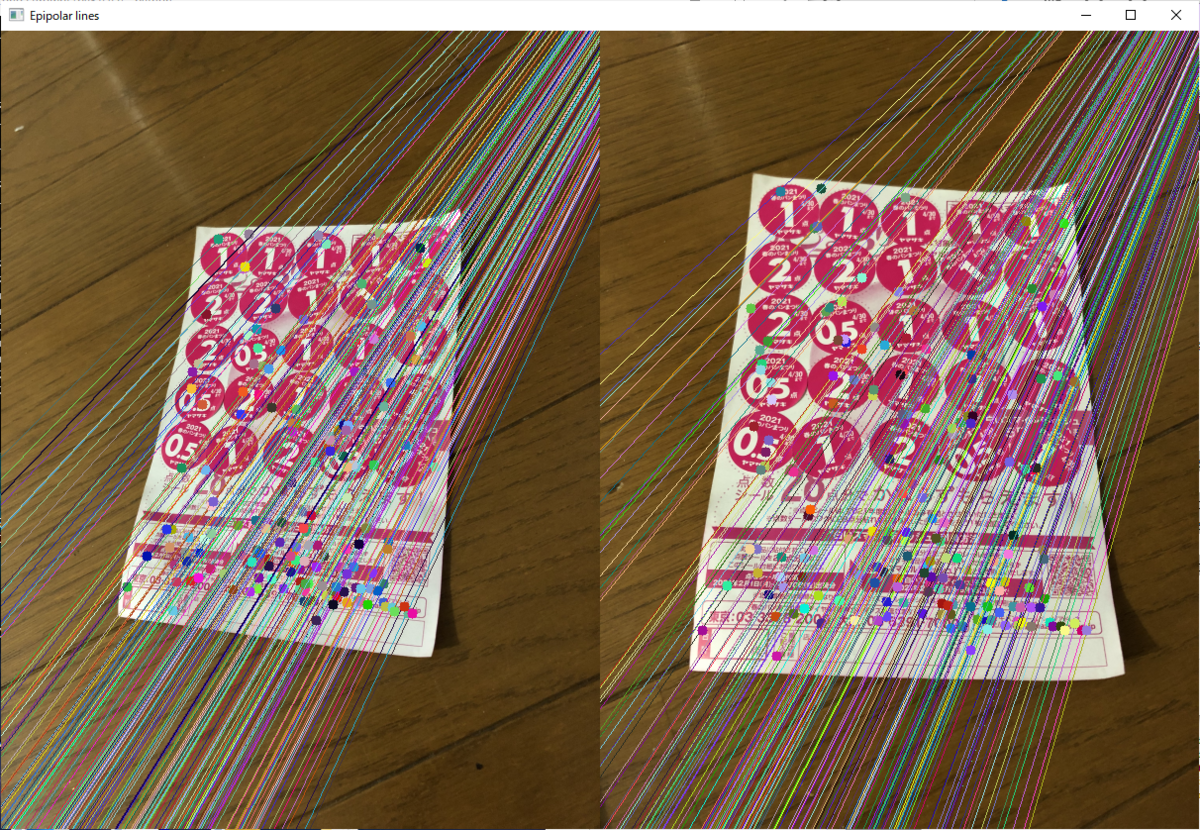
これまた変な結果に。
チュートリアルの最後のほうをよく見てみると、特徴点が1つの平面上にあると正しくFundamental matrixを計算できないという記載がありました。
Fundamental matrixの計算について
考察してみます。
以下のサイトのpdfを参考にしています。ケンブリッジ大学出版の教科書です。
Amazonで購入も可能なようです。
Amazon | Computer Vision: Models, Learning, and Inference | Prince, Simon J. D. | Machine Vision
Fundamental matrixについて
Fundamental matrixがどういうものかというと、途中経過は端折りますが、
任意の実空間座標
と、2視点からの画像上でこれに対応する点
(同次座標で)について、以下の式が成り立つ
というものです。
というように要素を書き下すと、式(1)は
と書けます。
はスケールの任意性があるので、自由度が8となっていて、8個以上のマッチングペアがあれば一意に決まります。
ここで、マッチングペアの点に対する実空間座標が全て同じ平面上にあった場合を考えます。
実空間座標をとすると、画像上の点(同次座標)
は
を使って以下のように表されます。
要素ごとに書くと、
式(2)にを掛けると、全ての項が
の積で表されるので、上の6式を代入してみると、式(2)における係数がいずれも
の線型結合で表されることがわかります。
なので、式(3)について8個の線形独立な係数ベクトルを用意することができ、
を一意に(定数倍の自由度を除いて)決めることができます。
ただし、の間に相関がある、例えばすべての実空間座標が1つの平面上にあると、
係数ベクトルがより少ない要素の線形結合になり、8個の線形独立なものを用意できなくなります。そうすると、一意に
を定めることができなくなると。
なんとなくうまくまとまらないけどそんな感じ。
ここまで
今回の内容はここまでにします。
本当はちゃんとFundamental matrixが求められれば3次元座標の推定もできるのですが…
参考
tex書き方参考。特にはてなブログでの書き方が特殊だったので。
はてなブログでTex記法を使って行列を書く時の注意点 - 医療職からデータサイエンティストへ